











Student Name: Jerico M.
Objective: Since we are nearing the day of the race, the main objective now was to design & get all of the materials necessary to build a decent robot within the limited specifications.
Procedure: While the other members of my group were finishing up the coding for the race to the wall challenge, I got some advice from our lecturer John. I was told that it would be best to do something on my own while my teammates were working on other things and so I did. I decided to grab a laptop and start the actual design of our robot since we haven’t made a proper one. In order to construct the design I’ve done below, I used Tinkercad as it was online and free.
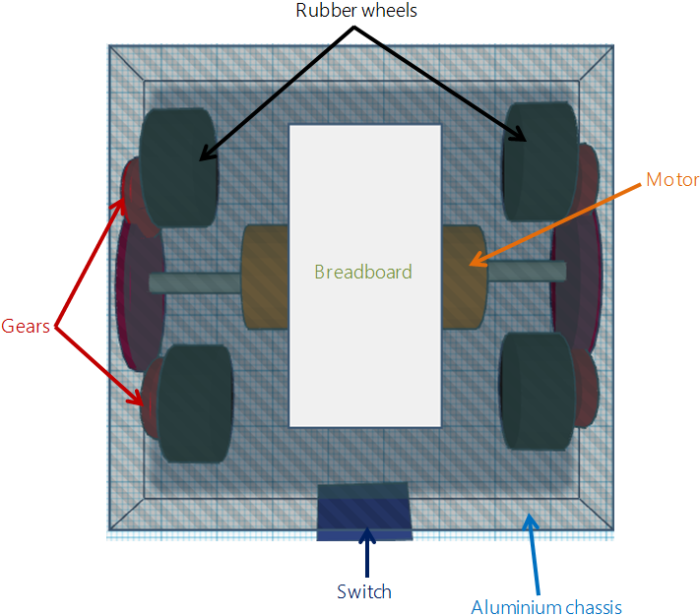
Now, it took me quite a while to get around Tinkercad especially without a mouse, good thing I was given one after awhile. Considering that we’ve decided on the amount of motors and wheels we were going to use, it was pretty straightforward to make out the design. Since I was given full-freedom on the design, I didn’t want to over-complicate things seeing as it was just a simple race to the wall. On the image I’ve shown above, the first thing you can notice is a basic four-wheel car with two motors and a layer of aluminum on top as our chassis. The breadboard was placed on top and the switch sticking out in the front. Although there are two things I haven’t included in the picture as I ran out of time as the laptops had to be taken. The IR sensor goes in the back of the chassis in between the two back wheels and a battery pack under the breadboard were the ones excluded in this picture. I also placed big gears on the shaft of the motors, with smaller gears on each wheel for torque. The reason for the big gear connected to the shaft was because I wanted balanced transmission of force between the gears.
Keep in mind that this was just a rough sketch and the initial design of our robot, of course things will change, we might remove some of the features I have put on the robot, but so far both of my teammates are happy with my design. I didn’t want to do anything too fancy since there was a 10 x 10cm limit on the size of the robot. We weren’t too worried for the maximum weight of the robot since the total weight of all four wheels were only roughly around 120g and our two motors together being 20g. The fact that we’re also only planning to use a really thin sheet of aluminum as our chassy, I think that with the breadboard and battery-pack, we won’t exceed the maximum weight of 500g.

Conclusion: For this week, I think that we’re on the right track since the only thing left to do was to build the robot and conduct the race next week. Another thing I took upon myself apart from the designing of our robot was to weigh all of our current materials, although we don’t have all of our materials yet, I was unable to weigh anything else. One thing I’ve learnt today was how to use Tinkercad and how important this kind of stuff is. I realized the importance of Tinkercad since I’m now familiar with it, I can utilize it for future projects and assignments if needed. I’ll definitely be using this for the design of our robot for the actual competition. This week was one of the best weeks in my opinion as I really do believe that we worked efficiently since each individual member of our group carried out different tasks i.e Me with the designing of the robot and noting measurements and my team-members working on the code.
