











Student Name: Jerico M.
Objective: Since there was no college today, I decided to start off the design of our robot for the actual competition.
Procedure: While I was home for the day, I thought that it was best to start constructing a new model for our robot with the help of my team-members suggestions. Even though we were off this week, there’s no time to waste. I used Tinkercad again in order to make the new design.
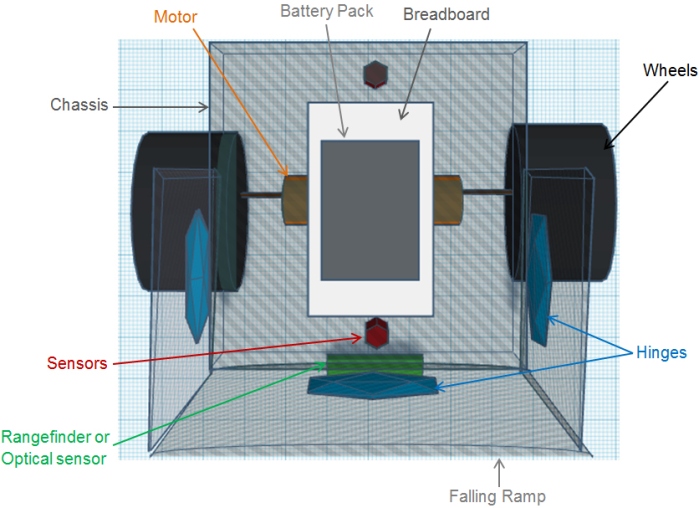
As you can notice, there are plenty of changes in comparison to our previous design. First thing we decided was to use two wheels, one for each motor since it was hard for us to implement four wheels controlled by two motors because of the size restrictions. The fact that we would have to use a longer shaft in order to have two wheels run by each motor exceeded 10cm, so we thought that it would be better to have two wheels, each run by one motor. We were also planning to cut the wheels by 0.5cm so that we could have the motors side by side without exceeding the limits.
Another thing that you can observe is that we are planning to use multiple reflective sensors and most likely multiple optical sensors/rangefinders too. The final new thing that we were really interested in implementing were ramps as we were planning to go offensive. 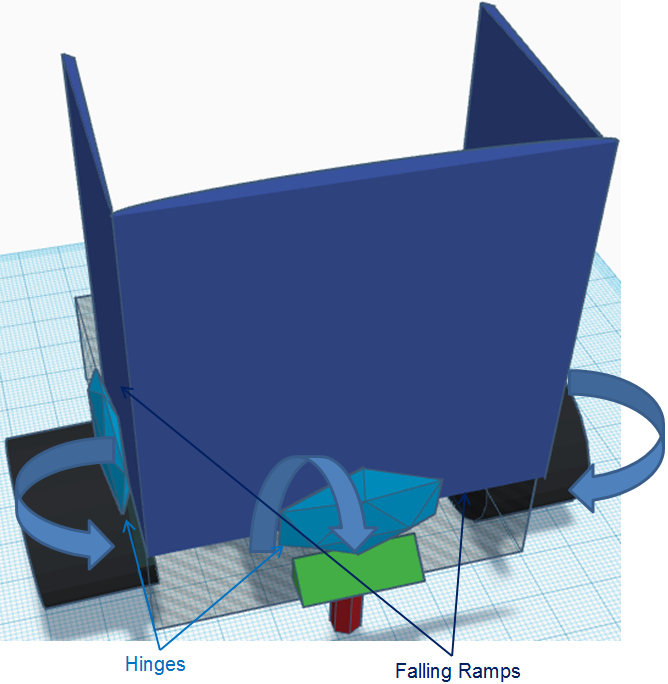
As I mentioned above, we were planning to go full-on offensive, so we thought of using tall ramps that would fall with the utilization of hinges. The idea was that we would still stay in the 10x10cm limits even with the use of really long ramps. The hinges used would need to be really lose so that the starting jolt when the robot moves is enough to make the ramps fall. Also, the fact that we’re planning to use only two wheels and cut them thinner means that we’ll have a lot of free weight, thus allowing us to use ramps. I will be showing these designs to my group the next time I see them to see if they want to alter my designs.
